Share:
Hello all!
Recently, my colleague, Ken Kalinowski, and I presented a workshop on the Power of Programming at the Canadian Seating and Mobility Conference (CSMC) in Toronto. (Ken is the Senior Service Technician and Technical Trainer with Sunrise Medical. He teaches Power Technical Training Programs in Canada and the United States.) I think it is fabulous to have the opportunity to learn hands-on, but for those of you who did not have the opportunity to attend CSMC and who are not very familiar with programming for power wheelchairs, this month's article will help to increase your comfort level with the very basics of programming for power chairs.
If you have any clients that drive power wheelchairs, it is important to have a basic understanding of programming because programming affects the performance and drive-ability of a power wheelchair. Sometimes, therapists are asked to assess a client's ability to drive a power chair, such as when a client moves into a long term care facility and brings a power wheelchair from the community. If we do not understand how programming of the electronics can be modified, we may falsely conclude that a client is unable to drive a power wheelchair safely if the programming is not optimal for the client's new environment. Perhaps a change in the programming will allow the client to "pass" a driving assessment and maintain the use of the power wheelchair and maintain independent mobility.
So, what are the basics of programming? Where should we start? For now, let's think about the common adjustments that can be made to the programming of a power chair. We are going to keep this simple and assume that we are looking only at programming a proportional joystick – where the amount of deflection of the joystick gimble corresponds to a given rate of movement, in the same way that a gas pedal on a car works.
Although power wheelchairs come from the factory with pre-set programming, it is important that the chair is programmed specifically for the client and for the environment(s) in which the client will use the wheelchair. Common adjustments for programming power wheelchairs include setting the minimum and maximum speeds, accelerations, and decelerations available in forward, in turns, and in reverse. Acceleration is how quickly the power chair reaches the programmed maximum speed, while deceleration is the rate at which the power chair will come to a stop after the joystick gimble is released. Forward acceleration, for example, can be set to provide a slow, smooth start or it can be set to be a very quick start, which can be jerky – or somewhere in between the two. Likewise, depending upon the programming, forward deceleration can be slow, coasting stop (that might not be quick enough to avoid sudden obstacles) or it can be a sudden stop that pitches the client forward – or somewhere in between the two. Client postural control and balance are two factors that will influence optimal programming in acceleration and deceleration for a given client.
When programming of speed is done, the values are expressed as a percent of the maximum available speed. For example, the minimum speed going in a forward direction may be set at 20 percent and the maximum speed may be set at 70 percent of the maximum available speed of that particular power base. The picture below illustrates the programming parameters that can be made for forward speed, with the numbers showing a percent of the maximum.
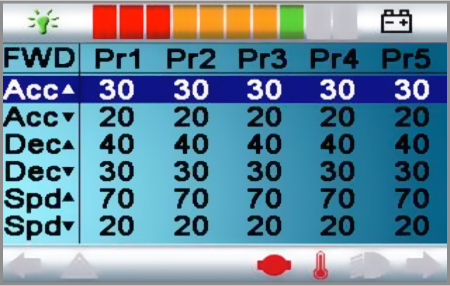
In the above picture, the letters across the top (Pr1, Pr2, Pr3, Pr4, Pr5) represent five different drive profiles. If the client is driving the wheelchair in different environments, the client may need to have the programming optimized for each environment. For example, the parameters may be lower for an indoor environment and higher for an outdoor environment. If the client regularly fatigues during the day or participates in different activities, specific programming can be made in different profiles to accommodate the different needs. (In the picture above, each profile is set with the same parameters, meaning that modification for different environments, conditions, and activities has not yet been done.)
Bear in mind, the above picture is just one snapshot of programming for the forward direction. Programming must also be done for turns and for reverse – setting maximum acceleration, deceleration and speed for each of these.
Other common parameters of programming that can be adjusted include torque and power. Torque is a function of power; therefore, if the programmed setting for power is decreased, the available torque also will be decreased. Torque in power chairs is needed in low speeds. Available torque helps the power chair to climb obstacles, such as curbs; to perform maneuvers from a stopped position, such as turning; and to perform maneuvers from low speeds, such as climbing a steep ramp (for example, into a van). With insufficient torque, the client may be unable to climb a curb cut-out without having a "running start" (i.e. backing up and having the power wheelchair in forward motion before attempting to climb a small obstacle, rather than climbing a small curb from a stopped position).
Power refers to the maximum amount of power that can be drawn from the battery. The amount of power influences the speed and torque that are available. The higher the power limit, the more power that is drawn from the battery. It is important to note that even when the Power is programmed to 100 per cent, normal driving does not pull 100 percent power from the controller. The maximum power is available when needed in certain stalled out conditions, such as when the power chair is stuck in a ditch and requires the use of maximum power to overcome the situation. Typically, when a client is a new power wheelchair user, the power is decreased in the programming as the client becomes accustomed to driving a power chair. Decreasing the power, to 30 per cent for example, while a client is in the initial learning phase can decrease the damage that is done to walls, doorways and furniture!
Another possible adjustment to the drive parameter is tremor dampening. This allows the sensitivity of the input device to be adjusted to dampen the effects of a tremor. In essence, tremor dampening reduces the responsiveness of the wheelchair to the small, unintended movements made on the input device, lessening the effects of the tremor, so that the wheelchair responds to the intended, directed movements made on the joystick gimble.
Adjustments for speed, acceleration and deceleration in forward, turns, and reverse, and for torque and power are the very basic parameters for programming. There are numerous other changes that can be made in programming. Three other parameters that are worthwhile to know about are changes that can be made to the programming of the joystick.
Deadband is the neutral zone around the centre of the gimble through which the joystick must pass before the motors are engaged. The size of the deadband can be programmed to suit the needs of the individual. For example, a client who uses a goal post to operate a power chair may unintentionally deflect the gimble away from centre due to the weight of the hand on the goal post and gravity pulling the goal post to either side. Increasing the size of the deadband increases the size of the neutral zone and means that the client must move the goal post through the neutral zone before the wheelchair will start to move. (Note: Deadband as a programming function is not available on all electronics.)
Active throw is very different than deadband. Active throw is used to decrease the distance that a client must deflect the joystick gimble to achieve the maximum programmed speed. For example, if active throw is set to 50%, the client has to push the gimble forward by only half as much distance, compared to factory pre-sets, to achieve maximum speed. This may be a good solution for a client who has muscle weakness and has difficulty maintaining full deflection of the input device.
The last programming change to the joystick that I will discuss is active orientation. This allows for a change in the axis or direction of the joystick orientation. For example, the joystick can be programmed such that pulling back, rather than the typical pushing forward, on the gimble results in a forward movement of the wheelchair. Active orientation also allows for the joystick to be changed to a mid-line mount, from a typical right- or left-mount, and to have the corresponding movements of the gimble be in the correct orientation for the user.
Are you wondering how programming changes are actually made on a power chair? Well that, my friends, is the topic of a future Clinical Corner article!